Configurar Mission Planner
Este es el tutorial fundamental para operar el sistema con ArduPilot. Cubre la configuración mínima para ver telemetría, los failsafes recomendados y la configuración opcional para visualización avanzada.
Antes de empezar
Mission Planner instalado.
Controlador de vuelo con CAN operativo.
Nodo Bridge conectado y alimentado.
Nota
Mission Planner se conecta al autopiloto por MAVLink (USB, telemetría radio o TCP/UDP). El acceso al Bridge se hace a través del autopiloto: la página DroneCAN/UAVCAN de Mission Planner habla MAVLink con el autopiloto y éste actúa como puente al bus CAN. No es necesario un adaptador USB-CAN ni el modo SLCAN para la operación normal con Mission Planner.
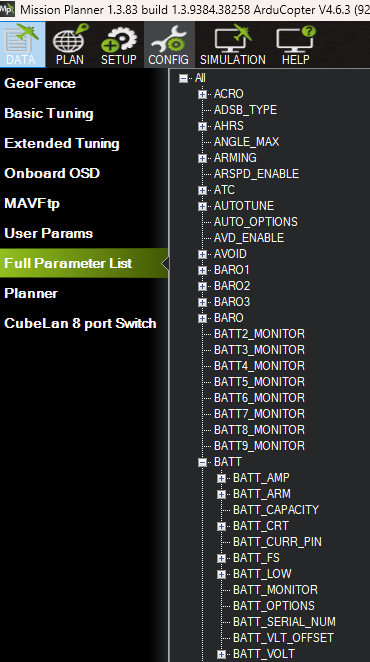
La configuración de los parámetros de ArduPilot desde Mission Planner se realiza desde Config → Full Parameter List.
1. Activar el driver CAN
CAN_P1_DRIVER = 1(First driver).

CAN_D1_PROTOCOL = 1(DroneCAN).

Hacer clic en Write Params y reiniciar el autopiloto
Truco
Para reiniciar el autopiloto se puede hacer uso del menú que podemos visualizar con Crtl+F.

Tras el reinicio, el Bridge debe aparecer en
Setup → Optional Hardware → DroneCAN/UAVCAN como un nodo con su Node ID
(por defecto 42).
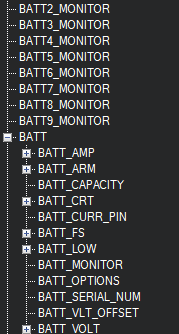
2. Configurar los tres monitores de batería
ArduPilot necesita un paso intermedio: hay que escribir los parámetros tras
poner los *_MONITOR en 8 para que se desbloqueen el resto de campos.
Activar los tres monitores:
BATT_MONITOR = 8(DroneCAN-BatteryInfo)BATT2_MONITOR = 8BATT3_MONITOR = 8

Haz clic en Write Params para guardar los cambios y que se actualicen los parámetros configurables de ArduPilot.
Vincular cada monitor con la
battery_iddel Bridge:BATT_SERIAL_NUM = 1BATT2_SERIAL_NUM = 2BATT3_SERIAL_NUM = 3

Capacidades:
BATT_CAPACITY = 2200(ajusta a la batería LiPo real conectada al bus 1, en mAh).BATT2_CAPACITY = 2200(batería LiPo bus 2).BATT3_CAPACITY = 100(fijo en 100: ver paso 4).
Haz clic en Write Params para guardar los cambios.
3. Configurar el relé de inicio/parada de la pila
RC9_OPTION = 28(Relay1 On/Off).RELAY1_FUNCTION = 1(Relay).

Haz clic en Write Params para guardar los cambios.
RELAY1_PIN = 1000(DroneCAN Hardpoint ID 0; debe coincidir conuavcan.fc_relay_hardpoint_iddel Bridge).Haz clic en Write Params para guardar los cambios.
4. Niveles low / critical y failsafes
Baterías LiPo (BATT1 y BATT2)
Para las baterías LiPo 12S recomendamos usar failsafes clásicos por tensión:
Parámetro |
Valor recomendado |
|---|---|
|
|
|
|
|
|
|
|
Advertencia
Ajusta los valores de tensión a las baterías usadas.
Reserva de hidrógeno (BATT3)
El Bridge publica BATT3 con tensión y corriente cero (la información
eléctrica real de la pila se publica como CircuitStatus), y publica un
mensaje auxiliar BatteryInfoAux con nominal_voltage = 1000 V. Con esa
configuración, BATT3_*_MAH se interpreta como porcentaje de H2
consumido (ver explicación en reserva de H2 como porcentaje) teniendo en cuenta que
el 100% de capacidad de la botella se da para 350 bares de presión.
Parámetro |
Valor recomendado |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
Advertencia
Ajusta los porcentajes al margen operativo de tu misión.
5. Habilitar mensajes del Bridge en el HUD
CAN_LOGLEVEL = 2
Truco
Con esto verás WARNING y ERROR del Bridge directamente en el HUD. Para
puesta a punto puedes subirlo a 3 y verás también INFO (cambios de estado
de la pila, etc.). El catálogo completo está en catálogo completo de mensajes de log.
6. Reiniciar el autopiloto
Reinicia el autopiloto para que se apliquen todos los cambios.
7. Verificación
En la pantalla de baterías deben aparecer tres instancias.
BATT1 y BATT2 muestran tensión y corriente reales.
BATT3 muestra
0 V,0 Ay un porcentaje correspondiente al H2 disponible.En el panel de mensajes deben aparecer mensajes con prefijo
h2:cuando ocurra algún cambio.
Visualización avanzada con script Lua (opcional)
Nota
Requiere ArduPilot con scripting Lua y la API DroneCAN para Lua
(DroneCAN_Handle) habilitados. Observado en funcionamiento con
ArduPilot 4.7.0 beta; versiones anteriores o compilaciones sin la API DroneCAN
no son compatibles.
Truco
Se puede actualizar un autopiloto Pixhawk desde el propio Mission Planner a un firmware que soporta la API DroneCAN.
Si quieres ver en Mission Planner las tensiones y corrientes individuales de la
pila y los buses LiPo, y las tensiones de salida de cada DC-DC, puedes instalar
el script Lua circuit_status_display.lua que H2 Dron Energy proporciona.
El script lee los CircuitStatus que publica el Bridge y los republica como
NAMED_VALUE_FLOAT MAVLink con los siguientes nombres:
Nombre |
Significado |
|---|---|
|
Tensión y corriente de la pila de combustible. |
|
Tensión y corriente del bus LiPo 1. |
|
Tensión y corriente del bus LiPo 2. |
|
Tensiones de salida de cada DC-DC. |
Nota
Mission Planner puede mostrar estos valores con el prefijo MAV_ (por ejemplo
MAV_BUS1_V, MAV_FC_A) aunque el script los envía sin dicho prefijo. Al añadir campos
al Quick panel o al HUD, busca el nombre con o sin prefijo según tu versión de Mission Planner.
Pasos
Solicita el script
circuit_status_display.luaal soporte de H2 Dron Energy si no lo tienes.Activa el motor de scripts con el siguiente parámetro de ArduPilot:
SCR_ENABLE = 1
Haz clic en Write Params y reinicia el autopiloto.
Copia
circuit_status_display.luaa la carpetaAPM/scripts/de la tarjeta SD del autopiloto.Truco
Puedes usar Config → MAVFtp desde Mission Planner para copiarlo sin extraer la SD.
Si el Node ID del Bridge no es 42, edita la línea
BRIDGE_NODE_IDal inicio del script con el Node ID real (también puedes ponerlo a0para aceptarCircuitStatusde cualquier nodo del bus).Vuelve a insertar la tarjeta SD y reinicia el autopiloto.
Al arrancar deberías ver en el HUD un mensaje INFO indicando que el script se ha cargado y el filtro de Node ID configurado.
Para ver los valores en Mission Planner:
Quick panel (pestaña Quick): haz doble clic sobre cualquier campo y elige los valores
FC_V,FC_A,BUS1_V, etc.HUD principal: haz clic derecho en el HUD, selecciona HUD Items y añade el valor deseado.

Advertencia
Limitación conocida de Mission Planner — etiquetas del Quick panel: los
valores se actualizan correctamente mientras Mission Planner está conectado,
pero las etiquetas personalizadas del Quick panel pueden no persistir
entre reinicios de Mission Planner y revertir a customfield0,
customfield1, etc, o cambiarse. Si eso ocurre, vuelve a seleccionar el nombre deseado
con doble clic sobre el campo. Como alternativa más estable, añade los
valores al HUD mediante HUD Items (paso 7 anterior).
Si no aparecen los valores
Verifica que el Bridge está visible en la página DroneCAN/UAVCAN y que está publicando
CircuitStatus.Verifica que
BRIDGE_NODE_IDdel script coincide con el Node ID real del Bridge.Verifica que
SCR_ENABLE = 1y que el script está enAPM/scripts/con extensión.lua.Los
NAMED_VALUE_FLOATse pueden mostrar en el Quick panel o en el HUD principal (clic derecho → HUD Items).Si los campos del Quick panel aparecen como
customfieldN, Mission Planner ha perdido las etiquetas (limitación conocida). Vuelve a seleccionar el nombre con doble clic y elige el valor deseado. Como alternativa permanente usa HUD Items en el HUD.
Supervisión del nodo Bridge (script Lua opcional)
El script bridge_watchdog.lua es un complemento operativo opcional. Monitoriza
los NodeStatus DroneCAN del Bridge y envía avisos al HUD de Mission Planner
cuando el Bridge se desconecta o se reconecta.
Qué hace
Envía un mensaje WARNING si el Bridge deja de emitir
NodeStatusdurante más de 3 segundos (tiempo configurable en el script).Envía un mensaje INFO cuando el Bridge vuelve a estar presente tras una desconexión previa.
No genera alertas hasta que el Bridge haya sido visto al menos una vez, evitando falsos positivos durante el arranque.
Solo monitoriza el nodo cuyo Node ID se configure en
BRIDGE_NODE_ID(por defecto42).
Pasos de instalación
Solicita el script
bridge_watchdog.luaal soporte de H2 Dron Energy.Copia
bridge_watchdog.luaaAPM/scripts/en la SD del autopiloto (junto acircuit_status_display.luasi también lo usas).Si el Node ID del Bridge no es
42, edita la líneaBRIDGE_NODE_IDal inicio del script.Asegúrate de que
SCR_ENABLE = 1y reinicia el autopiloto.Al arrancar deberías ver en el HUD un mensaje INFO indicando que el script se ha cargado correctamente.
Nota
Requiere ArduPilot con scripting Lua y la API DroneCAN para Lua
(DroneCAN_Handle) habilitados (mismo requisito que
circuit_status_display.lua).